Nature’s Blueprint: Designing Bio-Inspired Robotic Legs to move like a Salamander
We often imagine robots as the peak of mechanical complexity : mysterious machines with mechanisms that only experts can understand. Actually, for bioroboticists, it’s quite the opposite: robots are the tools, and the truly advanced mechanisms are found in nature, especially in animal motion. That’s why nature is the greatest source of inspiration for creating more high-performing, adaptable, and energy-efficient robots.
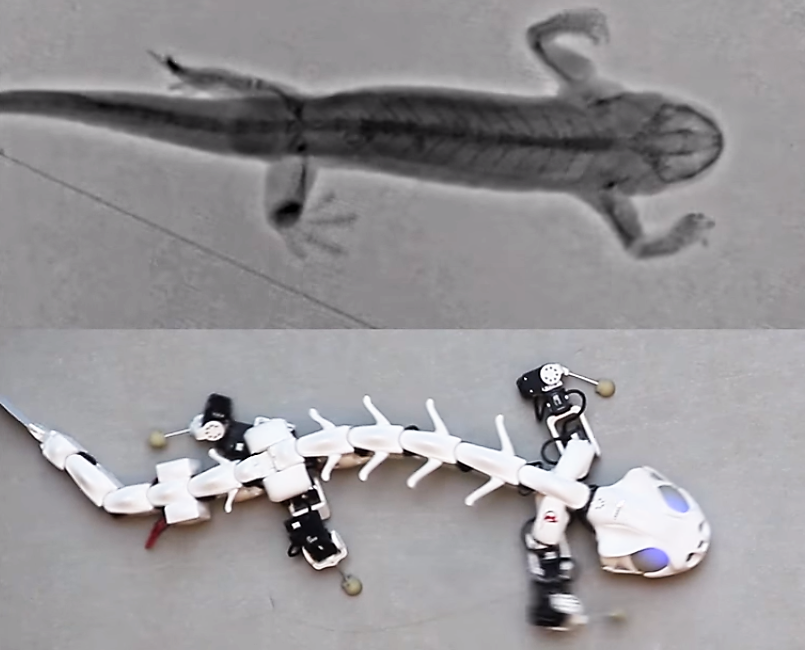
Pleurobot was created with this exact philosophy in mind. Inspired by the salamander Pleurodeles waltl, which can walk, crawl, and swim, Pleurobot mimics all these abilities. It’s an amphibious robot, which is pretty unique, using both its limbs and tail to travel on land and through water. It was developed and is currently improved by the BIOROB Lab team with whom I'm spending my summer.

For my research, I am trying to design new feet for Pleurobot. It can seem anecdotal and you might be wondering: how can I spend eight weeks on four feet ! But I can assure you, it is not as trivial as it seems : the feet have the particularity to be fully passive, which means they are not directly stimulated by a motor or controlled by an electronic system, although they must be compliant so that they can adapt to different terrains while staying stiff enough to assure a good propulsion. These functions are only partially filled with the current "ball-feet" design, which is why I am trying to improve it.
My approach was to first watch a lot of documentaries about salamanders, observing how their feet adapt to the ground and move at each step. I then decided to develop a first paw design and added a passive ankle mechanism. With 3D printing, I can quickly build prototypes and test them instead of loosing a lot of time on simulations. That's the magic of robotics : rapid prototyping often beats complex calculations, which certainly saves me some time 😉. At each iteration, my design improves and I hope that by the end of my internship, it will be good enough to truly increase Pleurobot 's performance.
Thank you for reading my mid-research report and feel free to reach out if you have any question about my work or if you have some good ideas to walk like a salamander ! 🦎
Image source : BIOROB Lab EPFL
Hello! I’m Thomas Delaloye, a Mechanical Engineering student at EPFL. I’m passionate about robotics, mechanical design, and hands-on projects that combine theory with real-world impact. Always eager to learn, share ideas, and meet people who challenge and inspire me!

Please sign in
If you are a registered user on Laidlaw Scholars Network, please sign in
Such a fascinating and challenging project, I really hope you get the results you’re aiming for by the end of your internship! Keep going Thomas!
I'm always enthralled by how many the most complex mechanisms are all around us in nature! Congrats on your work, I can't wait to see how you will tackle this challenge!
What an interesting project that really shows the compexity of the mechanisms found in nature! Thank you for this article Thomas!
Fascinating work Thomas! I am amazed by how, at the end of the day, we always turn back to nature to progress in technology - and life in general. Wish you the best of luck for the rest of your project, and can't wait to see the final result!
BIOROB lab's work is so fascinating and I love the project you are working on! Would we be able to see prototypes of your research during the research symposium?! :D I wish!! Keep up the good work, Thomas.
Congratulations for this amazing work Thomas, it’s amazing how much performance gain can come from such a fundamental component redesign! Am looking forward to seeing the final design!
Amazing work, Thomas ! Watching nature inspire robotics like this is so fascinating. Can't wait to see Pleurobot in action with your improvements !