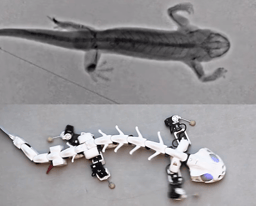
Bio-Inspired Feet Design For Salamander-Like Quadruped Robot
Can we try to imitate nature through robotics , to truly understand animal locomotion ?
Excited to share my research poster on improving Pleurobot’s movements with a redesigned compliant foot.
Preview
Here is the summary of my summer internship at BIOROB, a truly inspiring experience that helped me grow both technically and personally. I learned a lot about project management, self-discipline, and gained new skills, both practical and intellectual.
If you have any questions about my work, feel free to reach out. I’d be happy to tell you more :)
Student, EPFL
Hello! I’m Thomas Delaloye, a Mechanical Engineering student at EPFL. I’m passionate about robotics, mechanical design, and hands-on projects that combine theory with real-world impact. Always eager to learn, share ideas, and meet people who challenge and inspire me!
Please sign in
If you are a registered user on Laidlaw Scholars Network, please sign in